Abstract
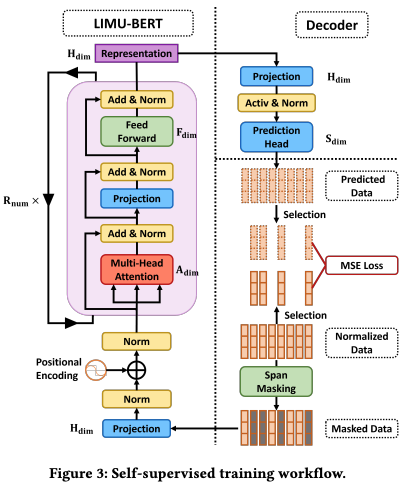
Deep learning greatly empowers Inertial Measurement Unit (IMU) sensors for various mobile sensing applications, including human activity recognition, human-computer interaction, localization and tracking, and many more. Most existing works require substantial amounts of well-curated labeled data to train IMU-based sensing models, which incurs high annotation and training costs. Compared with labeled data, unlabeled IMU data are abundant and easily accessible. In this work, we present LIMU-BERT, a novel representation learning model that can make use of unlabeled IMU data and extract generalized rather than task-specific features. LIMU-BERT adopts the principle of self-supervised training of the natural language model BERT to effectively capture temporal relations and feature distributions in IMU sensor measurements. However, the original BERT is not adaptive to mobile IMU data. By meticulously observing the characteristics of IMU sensors, we propose a series of techniques and accordingly adapt LIMU-BERT to IMU sensing tasks. The designed models are lightweight and easily deployable on mobile devices. With the representations learned via LIMU-BERT, taskspecific models trained with limited labeled samples can achieve superior performances. We extensively evaluate LIMU-BERT with four open datasets. The results show that the LIMU-BERT enhanced models significantly outperform existing approaches in two typical IMU sensing applications.
Shovito Barua Soumma
Graduate Research Associate
PhD Student
Currently I am working on building and optimizing deep learning models for wearable sensors data.